
With marine life and ecosystems facing a rising tide of threats, the need for nimble, cost-effective tools to measure and monitor ocean health is more urgent than ever. MBARI's CoMPAS Lab has developed a portable autonomous robot primed to study marine environments.
The MOLA AUV—multimodality, observing, low-cost, agile autonomous underwater vehicle—features advanced sensors to survey marine ecosystems. MBARI engineers hope the broader marine science community will benefit from the MOLA AUV’s open-source design specifications and software algorithms. MBARI envisions a fleet of nimble robots gathering data to help guide decision-making about the ocean and its resources.
Engineering innovation in action

MBARI scientists and engineers build and adapt advanced technology that enhances data collection in a wide variety of ocean environments. The team in MBARI’s CoMPAS Lab develops scalable marine technology that can be easily modified for use across a wide variety of vehicles and platforms, aiming to make MBARI’s innovations more broadly accessible. Their open-source, scalable tools allow MBARI to share its expertise with other marine scientists.
CoMPAS Lab scientists and engineers spent 18 months developing the MOLA AUV. Measuring 45 centimeters (18 inches) wide and 72 centimeters (28 inches) long, and weighing 30 kilograms (66 pounds), the robot is the latest of MBARI’s work to create smaller, more nimble platforms for ocean research. Robust platforms like the Dorado-class AUVs remain invaluable to MBARI’s work. However, their large size requires substantial resources for deployment. Similar to MBARI’s long-range autonomous underwater vehicle (LRAUV), the MOLA AUV can be deployed with a limited crew, either from a small boat or even from shore
At the core of the MOLA AUV is a commercially available Boxfish submersible, built to the CoMPAS Lab's specifications and enhanced with custom instruments and sensors developed by MBARI engineers.
The MOLA AUV is equipped with a 4K camera to record high-resolution video of marine life and habitats. Sonar systems use acoustics to ensure the vehicle can consistently “see” 30 meters (100 feet) ahead and work in tandem with stereo cameras that take detailed imagery of the ocean floor. Leveraging methods developed by the CoMPAS Lab, the vehicle’s six degrees of freedom enable it to move and rotate in any direction efficiently. This agility and portability set the MOLA AUV apart from other underwater vehicles.
A leap forward for seafloor mapping
The CoMPAS Lab has developed advanced algorithms for navigation and mapping. MBARI engineers have integrated CoMPAS Lab sensors and software to make the MOLA AUV a powerful tool for mapping the seafloor.

GPS does not work underwater, which makes mapping more difficult in the ocean than on land. To overcome this challenge, MBARI engineers leverage simultaneous localization and mapping (SLAM) software technology that allows a vehicle to navigate through many locations and see how they all fit together.
Traditional mapping methods use sonar mounted on ships, but the distance between the ocean surface and the seafloor results in low-resolution data. The MOLA AUV can travel closer to the seafloor and visualize the terrain below in much greater detail, especially in rough terrain—imagine the difference between a picture taken a mile away and an up-close shot.
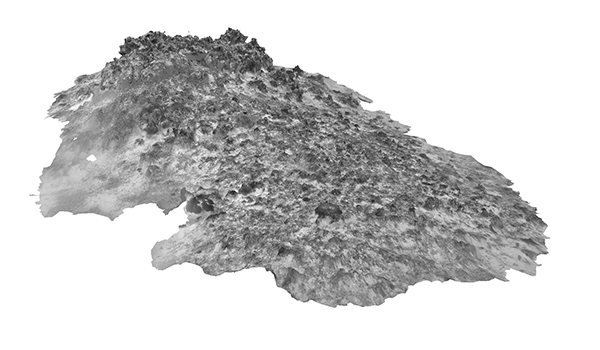
Combining data captured by the vehicle’s sensor suite, engineers can create three-dimensional photo reconstructions of seafloor environments. These higher-resolution images will ultimately enable the team to create a searchable map of the ocean floor. Researchers can then use that data to return to specific sites and track changes over time.
Putting MOLA AUV to the test
In November 2024, the CoMPAS Lab traveled to the Maldives to field-test the vehicle for the first time. Partnering with MBARI Senior Scientist Aaron Micallef and the University of Milano-Bicocca, members of the CoMPAS Lab spent 11 days at the Marine Research and Higher Education (MaRHE) Center in Magoodhoo. Located just offshore from the research center, the complex coral structure of the shallow-water reef provided an ideal environment for safely testing the technology’s mapping capabilities.
Unlike other MBARI technology, which requires complicated logistics for field expeditions outside Monterey Bay, the MOLA AUV can be transported in a checked bag, demonstrating its portability.
The team first operated the vehicle remotely via a tether to the boat, then set the MOLA AUV loose to complete two autonomous missions to collect still imagery, acoustic imagery, salinity and temperature data, and 4K video.
During these dives, the CoMPAS Lab team was able to gather just as much data with the MOLA AUV as they could with some of MBARI’s larger research platforms. These were spectacular results for the vehicle’s first field test and a testament to this small robot’s robust capabilities.
These dives helped MBARI engineers identify opportunities to improve the vehicle’s ability to navigate rugged terrain and currents. The goal is for the MOLA AUV to use its sensors to find a reef and begin mapping autonomously without human oversight.
Next steps
The CoMPAS Lab is already growing its fleet of MOLA AUVs. MBARI engineers have outfitted a second vehicle with an expanded diving range of 1,000 meters (3,300 feet), double that of the original MOLA AUV. Following several successful deployments in MBARI’s backyard of Monterey Bay last year, CoMPAS Lab engineers will join expeditions to the Arctic, Greece, and Tahiti in 2026 to continue testing the vehicle’s mapping capabilities in diverse marine environments.
The MOLA AUV is just one example of the versatile ocean exploration technology that the CoMPAS Lab is developing. The MOLA AUV’s sensors are designed to be scaled and used in other vehicles and platforms. For example, the destination and navigation code is the same software programming used in MBARI’s MiniROV.
Over time, MBARI plans to make the MOLA platform open-source. This will make all the information about the vehicle’s hardware and software available to the public, allowing other interested parties to adapt this technology for their own uses. With open-source technology, the CoMPAS Lab aims to make ocean exploration and science more accessible.

A new deep reinforcement learning controller enables energy-efficient, yet agile, operations in the MOLA AUV that can help uncrewed underwater vehicles operate autonomously for longer periods of time. Image: Giancarlo Troni Name © 2025 MBARI
The ocean is enormous. One robot out there collecting data will not make a huge difference, but developing a portable, agile, cost-effective platform—and making the engineering behind the scenes accessible to all—expands the capacity for advanced science and engineering among our peers in the ocean exploration community.
“Nimble robots equipped with powerful software algorithms can reduce the barriers to ocean exploration and support efforts to map the global seafloor and monitor ocean health.”
—Principal Engineer Giancarlo Troni
Research Publication:
Scholin, C. 2025. Oceanography in the age of intelligent robots and a changing climate. Oceanography, 38(3): 60–73. https://doi.org/10.5670/oceanog.2025.e310