
Animal-tracking algorithms are being developed and tested at MBARI for a new breed of underwater robots that will revolutionize how we study deep-sea animals. Re-engineered versions of tracking algorithms were recently demonstrated on MBARI’s MiniROV. Here, you see the MiniROV automatically tracks a white metal pipe during vehicle control and tracking trials conducted in the MBARI test tank.

During MiniROV sea trials, researchers observed a Phronima amphipod swimming in its parasitized salp barrel. Using both red and white illumination, differences in animal behavior were quantified from the stereo footage (top panel) by mapping the animal’s orientation over time (bottom panel). Video by Paul Roberts.

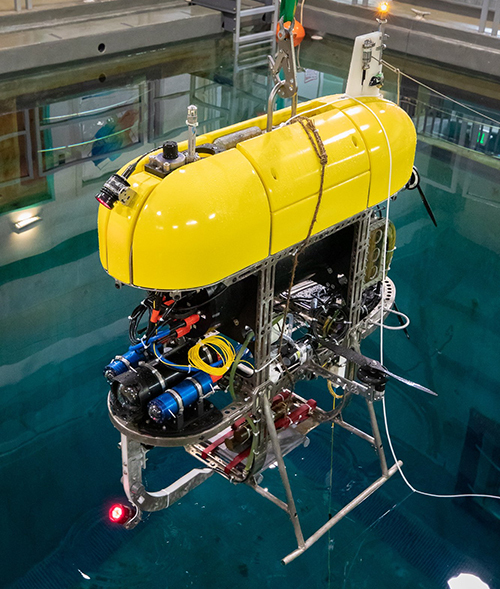
Birds-eye view of Mesobot from the camera on the SmartClump.